Előszó
Üdvözöllek a honlapon, amely rövid, vázlatos formában segít átismételni és megtanulni a BME Mecharonika BSc záróvizsga tételeit (különös tekintettel az Okoseszközök tervezése specializáció tételeire).
Fontos Ha a megjelenített információkat pontatlannak találod, a honlap nyílt forráskódjának és a markdown-formátum egyszerűségének köszönhetően a teljes vázlatot átszerkesztheted. Javítani ér!
Eddig kidolgozásra került tételek
-
Irányítástechnika
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
-
Gépészeti automatizálás
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
-
Mérésadatgyűjtés
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
-
Finommechanika
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
-
Szervopneumatika
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
-
Elektronikai rendszerek tervezése
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 1. Ismertesse a kanonikus szabályozási kör elvi felépítését, egy példán keresztül mutassa be, hogy miként befolyásolja az arányos tag (P) a rendszer gyorsaságát, illetve statikus pontosságát. Ismertesse az integráló tag (I) szerepét a szabályozási körben!
- 2. Mutassa be lineáris időinvariáns rendszerekre vonatkozóan az alapvető stabilitási definíciókat és azok kritériumait zárt szabályozási körre alkalmazva!
- 3. Ismertesse a kanonikus szabályozási kör elvi felépítését, mutassa be az alapjel, a zavarás és a zaj hatását, mint a rendszer bemenetei a kimenő jelre, a hibajelre és a beavatkozó jelre, mint a rendszer kimenetei!
- 4. Ismertesse arányos-integráló-deriváló (PID) szabályozó egyenletét idő és frekvencia tartományban! Mutassa be a szabályozó tagok szerepét, illetve a pólus-zérus kiejtésen alapuló szabályozótervezés menetét!
- 5. Folytonos idejű, lineáris, időinvariáns (LTI) rendszerek esetén ismertesse az állapot irányíthatóság definícióját, illetve a vizsgálathoz alkalmazott Kálmán-féle rangfeltételt! Mutassa be az állapot-visszacsatolás tervezésének lépéseit egy bemenetű egy kimenetű (SISO) rendszerekre nézve.
- 6. Folytonos idejű, lineáris, időinvariáns (LTI) rendszerek esetén ismertesse az alapjelkompenzációval kiegészített állapot-visszacsatolás tervezésének lépéseit! Vezesse le az állapot-visszacsatolástól függő alapjelkompenzáció meghatározására szolgáló összefüggéseket!
- 7. Folytonos idejű, lineáris, időinvariáns (LTI) rendszerek esetén ismertesse az alapjelkompenzációval kiegészített állapot-visszacsatolás tervezésének lépéseit! Vezesse le az állapot-visszacsatolástól független alapjelkompenzáció meghatározására szolgáló összefüggéseket!
- 8. Folytonos idejű, lineáris, időinvariáns (LTI) rendszerek esetén mutassa be az állapot megfigyelhetőség definícióját, illetve a vizsgálathoz alkalmazott Kálmán-féle rangfeltételt! Vezesse le az állapot-megfigyelő tervezéséhez szükséges összefüggéseket!
- 9. Ismertesse a diszkrét idejű szabályozási kör elvi felépítését, valamint vezesse le a mintavételes rendszer diszkrét idejű állapottér modelljét! Válaszában térjen ki a Shannon-féle mintavételezési törvényre!
- 10. Mintavételes lineáris, időinvariáns (LTI) rendszerek esetén mutassa be a stabilitás definícióját, valamint ismertesse a véges beállású (dead-beat) szabályozó tervezésének lépéseit állapotvisszacsatolás segítségével
1. Ismertesse a kanonikus szabályozási kör elvi felépítését, egy példán keresztül mutassa be, hogy miként befolyásolja az arányos tag (P) a rendszer gyorsaságát, illetve statikus pontosságát. Ismertesse az integráló tag (I) szerepét a szabályozási körben!
2. Mutassa be lineáris időinvariáns rendszerekre vonatkozóan az alapvető stabilitási definíciókat és azok kritériumait zárt szabályozási körre alkalmazva!
3. Ismertesse a kanonikus szabályozási kör elvi felépítését, mutassa be az alapjel, a zavarás és a zaj hatását, mint a rendszer bemenetei a kimenő jelre, a hibajelre és a beavatkozó jelre, mint a rendszer kimenetei!
4. Ismertesse arányos-integráló-deriváló (PID) szabályozó egyenletét idő és frekvencia tartományban! Mutassa be a szabályozó tagok szerepét, illetve a pólus-zérus kiejtésen alapuló szabályozótervezés menetét!
5. Folytonos idejű, lineáris, időinvariáns (LTI) rendszerek esetén ismertesse az állapot irányíthatóság definícióját, illetve a vizsgálathoz alkalmazott Kálmán-féle rangfeltételt! Mutassa be az állapot-visszacsatolás tervezésének lépéseit egy bemenetű egy kimenetű (SISO) rendszerekre nézve.
6. Folytonos idejű, lineáris, időinvariáns (LTI) rendszerek esetén ismertesse az alapjelkompenzációval kiegészített állapot-visszacsatolás tervezésének lépéseit! Vezesse le az állapot-visszacsatolástól függő alapjelkompenzáció meghatározására szolgáló összefüggéseket!
7. Folytonos idejű, lineáris, időinvariáns (LTI) rendszerek esetén ismertesse az alapjelkompenzációval kiegészített állapot-visszacsatolás tervezésének lépéseit! Vezesse le az állapot-visszacsatolástól független alapjelkompenzáció meghatározására szolgáló összefüggéseket!
8. Folytonos idejű, lineáris, időinvariáns (LTI) rendszerek esetén mutassa be az állapot megfigyelhetőség definícióját, illetve a vizsgálathoz alkalmazott Kálmán-féle rangfeltételt! Vezesse le az állapot-megfigyelő tervezéséhez szükséges összefüggéseket!
9. Ismertesse a diszkrét idejű szabályozási kör elvi felépítését, valamint vezesse le a mintavételes rendszer diszkrét idejű állapottér modelljét! Válaszában térjen ki a Shannon-féle mintavételezési törvényre!
10. Mintavételes lineáris, időinvariáns (LTI) rendszerek esetén mutassa be a stabilitás definícióját, valamint ismertesse a véges beállású (dead-beat) szabályozó tervezésének lépéseit állapotvisszacsatolás segítségével
Gépészeti automatizálás tételek
- 1. Logikai elemek, relációk. De Morgan azonosságok. Logikai függvények szabályos (kanonikus) alakjai
- 2. Egy és két változó logikai függvényei. Logikai függvények egyszerűsítésének módszerei. Egyszerűsítés minterm tábla segítségével.
- 3. Kombinációs és szekvenciális logikai hálózat fogalma. Nem teljesen határozott logikai hálózat fogalma. Statikus és dinamikus hazárd.
- 4. A vezérlések csoportosítása. Programvezérlés fajtái. Vezérlések megbízhatóságának növelési lehetőségei. Védelmi funkciók ipari rendszerekben.
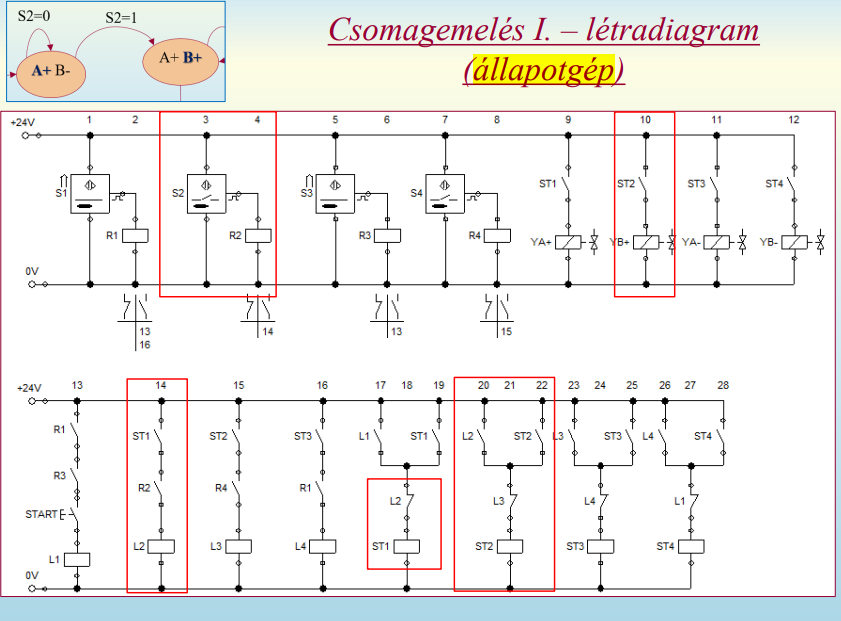
- 5. Állapotgép fogalma. Állapotátmenet sémája létradiagramban. Léptetőlánc megvalósítása relés kapcsolással.
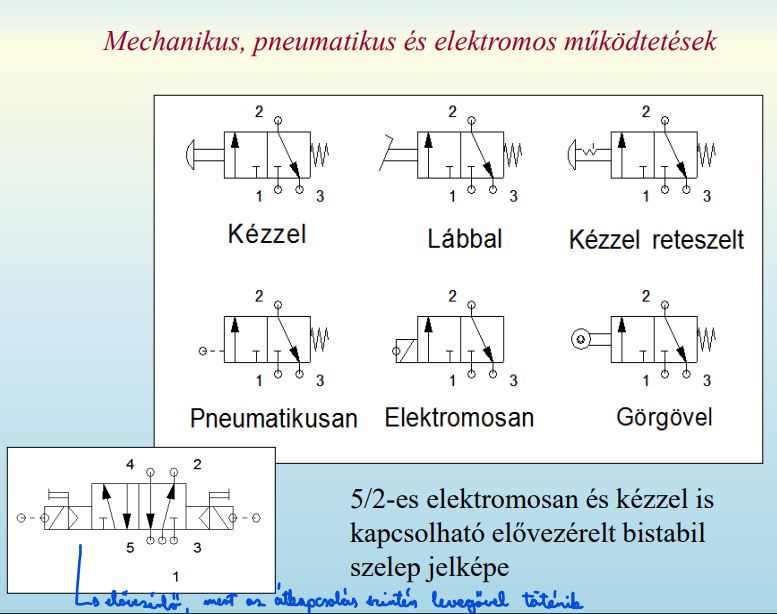
- 6. A sűrített levegő, mint munkavégző közeg előnyei és hátrányai. A technológiai sűrített levegő előkészítése és eszközei. A pneumatikus elemek csoportosítása. A pneumatikus jelképrendszer bemutatása a szelepek jelképein keresztül.
- 7. Bináris szenzorok csoportosítása. Közelítéskapcsolók főbb típusai, jellemzőik. Időzítők és számlálók típusai viselkedése az automatizálás területén.
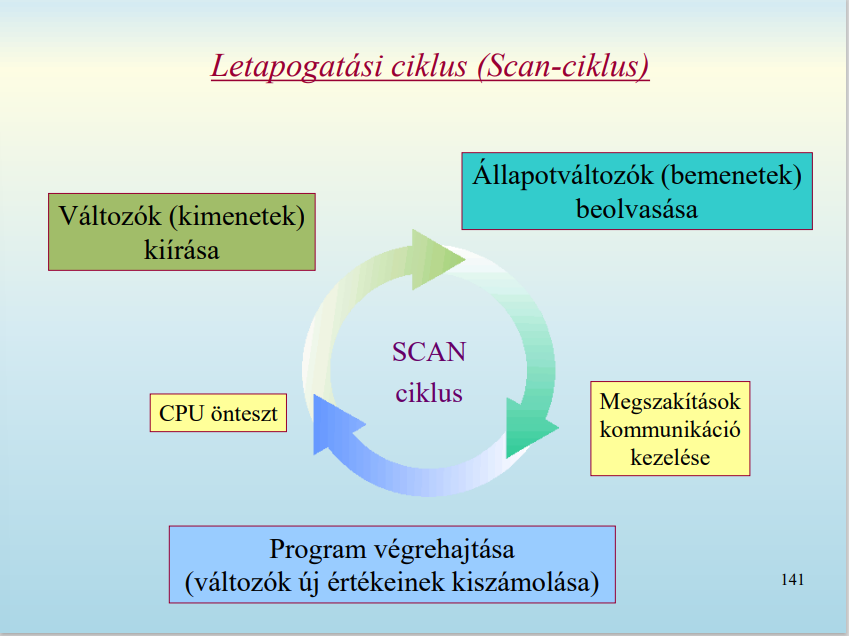
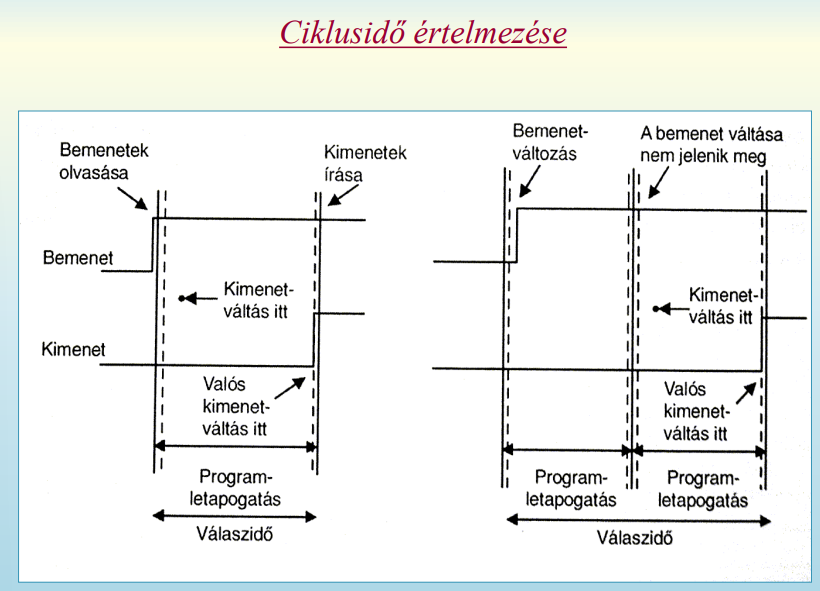
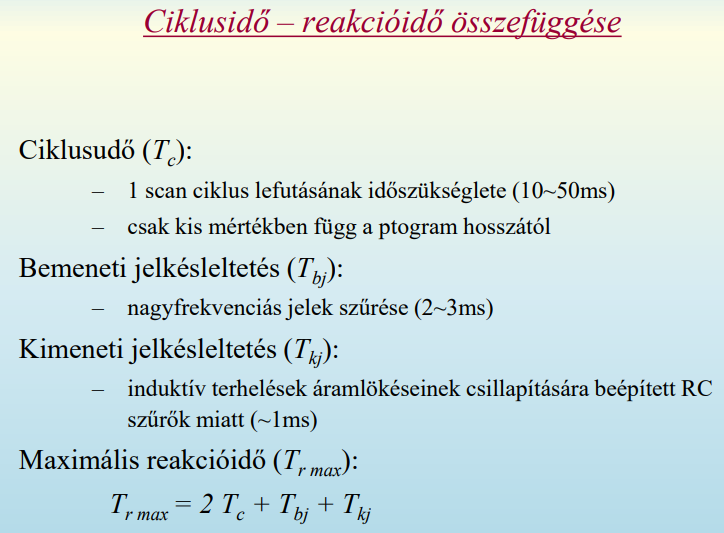
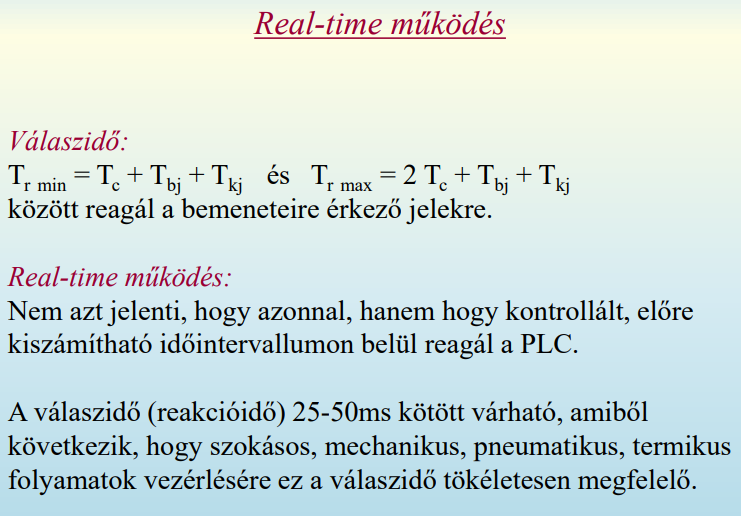
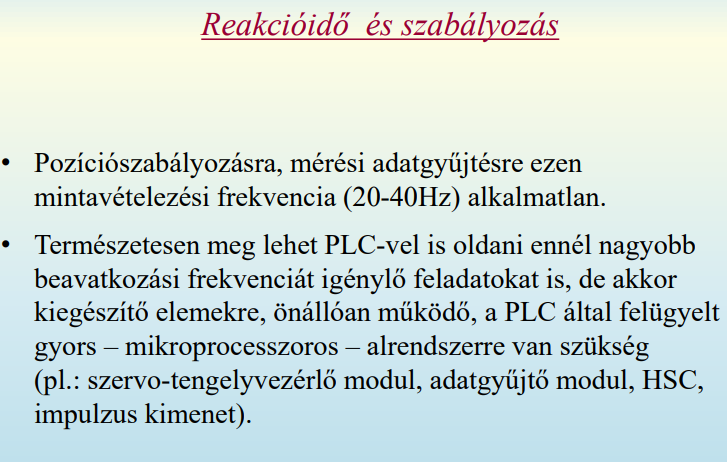
- 8. Mit jelent a SCAN ciklus fogalma? Mekkora egy PLC reakcióideje? Mit nevezünk Real-time üzemmódnak?
- 9. PLC-k funkcionális egységei. PLC program-hierarchia, felhasználói programnyelvek típusai.
- 10. Nyomáshatároló szerepe a hidraulikus rendszerekben. Hidraulikus fojtások fajtái, jellemzői.
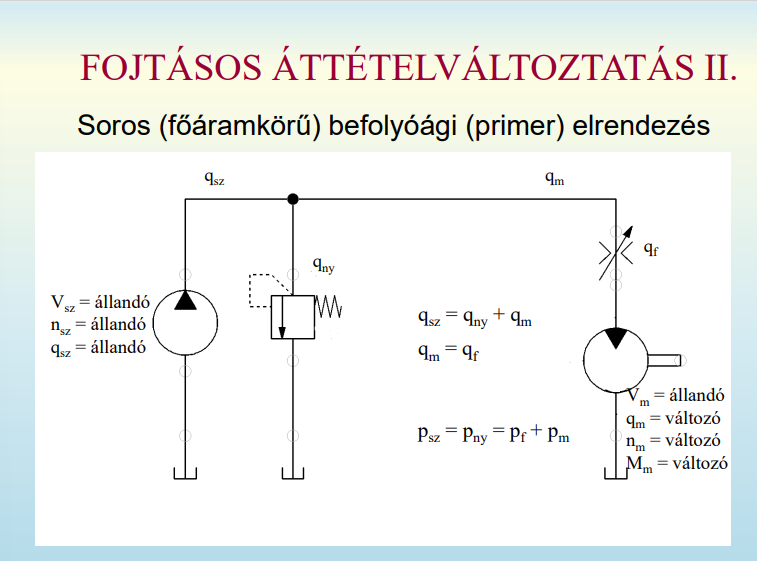
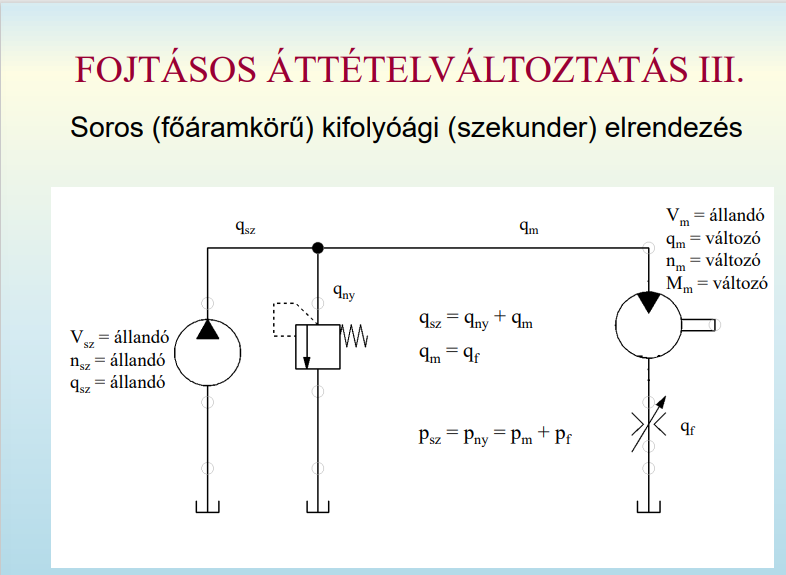
- 11. Fő és mellékáramkörű hidraulikus áttétel változtatás (áramkör, magyarázat)
1. Logikai elemek, relációk. De Morgan azonosságok. Logikai függvények szabályos (kanonikus) alakjai
- pneumatikus logikai elemek
- De Morgan azonosságok:
$$ \overline{(a \land b)} = \overline{a}\lor\overline{b} $$ $$\overline{(a \lor b)} = \overline{a}\land\overline{b} $$
- De Morgan azonosságok általánosítva (Shannon szabálya):
$$\overline{[f(x_1, x_2,\ldots, x_n, \cdot, +)]} = f(\overline{x_1}, \overline{x_2}, \ldots, \overline{x_n}, +, \cdot) $$
- kanonikus forma
- a függvény olyan szisztematikus módon való megadása, melyben minden függvény csak egy módon adható meg
- (egyértelműség)
- mintermek
- logikai szorzatok összege
- Sum Of Products (SOP)
- diszjunktív forma
- pl. \(F(A,B,C)=m_1+m_3=\overline{A}\cdot\overline{B}\cdot C+\overline{A}\cdot B \cdot C\)
- minterm elnevezés → szűkítés (metszetképzés)
- logikai szorzatok összege
- maxtermek
- logikai összegek szorzata
- Product Of Sums (POS)
- konjunktív forma
- pl.: \(F(A,B,C) = M_1\cdot M_2 = (\overline{A}+\overline{B}+C)\cdot(\overline{A}+B+C)\)
- maxterm elnevezés → bővítés (unióképzés)
- logikai összegek szorzata
2. Egy és két változó logikai függvényei. Logikai függvények egyszerűsítésének módszerei. Egyszerűsítés minterm tábla segítségével
-
egy változó logikai függvényei
- 0 → 0, 1
- 1 → 0, 1
- ponálás (állítás), negálás
-
két változó logikai függvényei
- általánosan alkalmazottak
- AND, OR, XOR
- NAND, NOR, XNOR
- NAND, NOR összes kétváltozós függvényt képes előállítani
- általánosan alkalmazottak
-
egyszerűsítések módszerei
- algebrai minimalizálás
- alkalmazható összefüggések:
- \(A+1=1\) és \(A+\overline{A}=1\)
- kiemelés
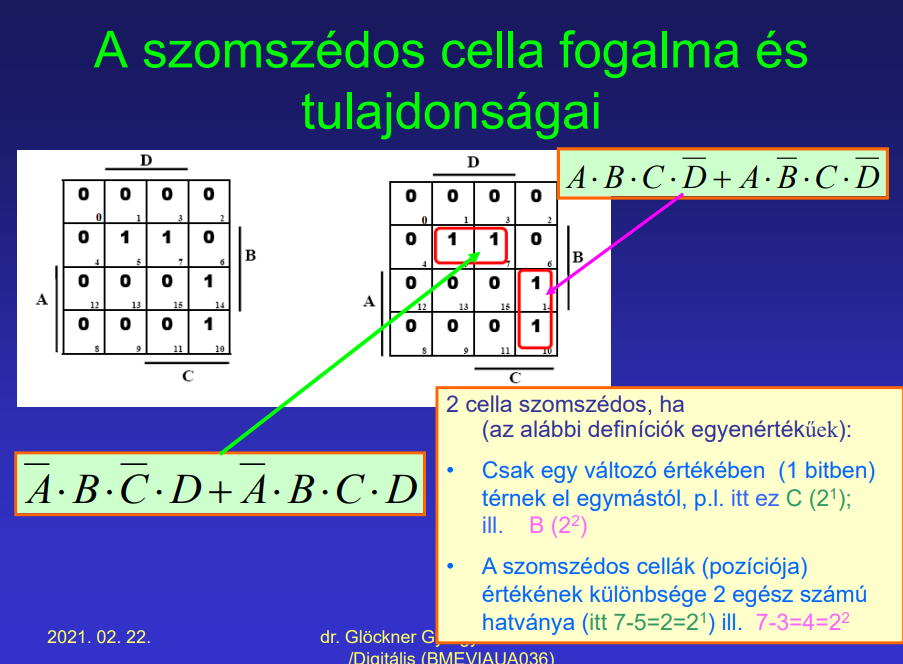
- mintermes alak két tagja csak egy változó ponált és negált alakjában különbözik → változó elhagyható
- pl. \(\overline{A}\cdot B\cdot C + A\cdot B \cdot C = B\cdot C\)
- alkalmazható összefüggések:
- példa minterm táblás (Karnaugh-táblás?) egyszerűsítésre:
- algebrai minimalizálás
3. Kombinációs és szekvenciális logikai hálózat fogalma. Nem teljesen határozott logikai hálózat fogalma. Statikus és dinamikus hazárd
- kombinációs hálózat fogalma
- Olyan (működésüket tekintve logikai függvényekkel leírható) logikai hálózatok, rendszerek, melyek adott pillanatbeli kimeneti állapotát, értékét egyértelműen meghatározza bemeneti állapota, értéke
- szekvenciális hálózat fogalma
- Olyan logikai hálózat, amelynek adott pillanatbeli kimeneti állapotát az adott pillanatbeli és korábbi bemeneti és kimeneti állapota határozza meg
- képes “emlékezni”, memória
- nem teljesen határozott logikai hálózat
- a logikai függvény bizonyos celláinak értéke nem specifikált, amelyeket egyszerűsítéskor a kívánalmaknak megfelelően egyaránt tekinthetünk 0-nak vagy 1-nek
- statikus hazárd
- Statikus hazárdnak nevezzük azt a jelenséget, ha egy kétszintes logikai hálózat bemenetén egy változó jelet vált, s annak ellenére, hogy mindkét értékhez azonos kimeneti érték tartozik, a jelváltás hatására mégis fellép egy rövid idejű hamis kimeneti érték.
- nem ideális jelterjedés miatt
- statikus hazárd és megoldása Karnaugh-táblán: ![[Pasted image 20231126132521.png]]
- kapuszintek bevezetésével eltüntethető
- szomszédos bemeneti kombinációk kihasználatlansága miatt keletkezhet csak
- dinamikus hazárd
- A dinamikus hazárd, csak három vagy többszintű kapuhálózatokban alakulhat ki, és azokban is csak akkor, ha a hálózatnak van kétszintes, hazárdos részlete.
- A dinamikus hazárd úgy jelentkezik, hogy amikor a hálózat egy bemenő jelének szintváltása a kimeneten szintváltást idéz elő, a kimeneten a szintváltás többszörös átmenet után jön csak létre. A dinamikus hazárd elleni védekezés egyszerű – meg kell szüntetni a hazárdot a belső, kétszintes részletben.
- pl. \(x_1 \rightarrow x_2\) esetén \(F_1 \rightarrow F_2\) helyett \(F_1 \rightarrow F_2 \rightarrow F_1 \rightarrow F_2\) lesz a kimenet
- tranziens közbenső állapotok jönnek létre
- forrás
4. A vezérlések csoportosítása. Programvezérlés fajtái. Vezérlések megbízhatóságának növelési lehetőségei. Védelmi funkciók ipari rendszerekben
-
vezérlés
- szinkron
- szükség van valamilyen órajelre, hogy minden folyamat lépése egyszerre játszódjon le
- Olyan vezérlés, ahol a jelfeldolgozást egy órajel szinkronizálja
- aszinkron
- pl. diszkrét logikával (pneumatika)
- Órajel nélkül működő vezérlés, ahol a jelváltozásokat kizárólag a bemenőjelek megváltozása idézi elő
- logikai (kombinációs)
- pl. kombinációs hálózat
- Olyan vezérlés, amelyik a bemenő jelek állapotaihoz a Boole-algebra logikai múveleteinek megfelelően vannak hozzárendelve a kimenőjelek
- lefutó (szekvenciális)
- Előre programozott sorrendben, lépésenként haladó vezérlés, ahol az egyik lépésről a program szerinti következő lépésre a továbblépés a léptetési feltételek függvényében történik meg
- pl. szekvenciális hálózat
- idővezérelt
- Olyan lefutó vezérlés, amelynek léptetési feltételei kizárólag időfüggőek. Az időfüggő vezérlés fogalma a vezető jel időfüggő megadására van fenntartva.
- honnan lehet tudni, hogy befejeződött egy folyamat?
- folyamatvezérelt
- Olyan lefutó vezérlés, amelynek léptetési feltételei csak a vezérelt berendezés (folyamat) jeleitől függenek
- szinkron
-
vezérlések megbízhatóságának növelése
- biztonsági vezérlés
- magas rendelkezésre állás
- leállás nagy költségekkel jár, vagy lassú az újraindítás
- nagy megbízhatóságú elemekből építkezés
- redundáns eszközök, rendszerek beépítése
- a redundancia lehet
- gépi
- berendezések megkettőzése
- pl. fék ECU-ja két azonos működésű mikrokontrollert tartalmaz
- információ
- pl. paritásbit, CRC
- program
- programegységek többszörözése
- gépi
- redundancia szintjei
- elem szintű
- áramköri elemek többszörözése
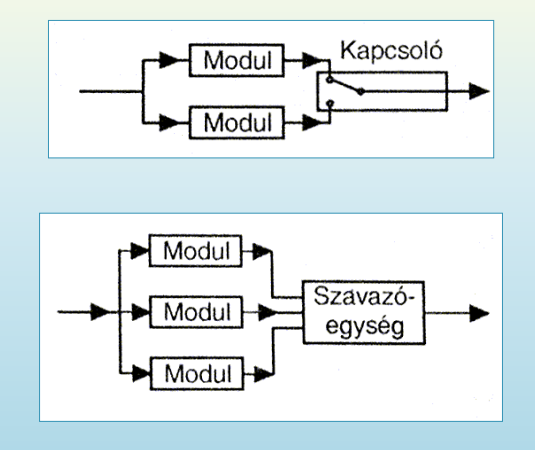
- modul szintű
- modulok (szenzorok) többszörözése
- rendszerszintű
- teljes rendszer többszörözése
- elem szintű
- tartalékrendszerek
- hidegtartalék
- tartalék bekapcsolása az irányító meghibásodásakor
- melegtartalék
- tartalék bekapcsolva, bármely pillanatban képes átvenni a vezérlést, állandó adatfrissítés a tartalék rendszeren
- párhuzamos működésű tartalékrendszer
- nem minden esetben dönthető el, melyik a tartalék
- automatikus átkapcsolás
- hidegtartalék
- a redundancia lehet
-
védelmi funkciók ipari rendszerekben
- vész- és védelmi feladatokról
- legmagasabb prioritás
- célja az élet- és vagyonvédelem
- folyamat során veszélyes érték megközelítése → berendezés leállítása
- vészleállítás a kezelő részéről
- reteszelés
- prioritás közvetlenül a védelem után
- valamely fontos feltétel nemteljesülése esetén a leállítás vagy az indítás megakadályozása (védőrács, hűtőszivattyú)
- vész- és védelmi feladatokról
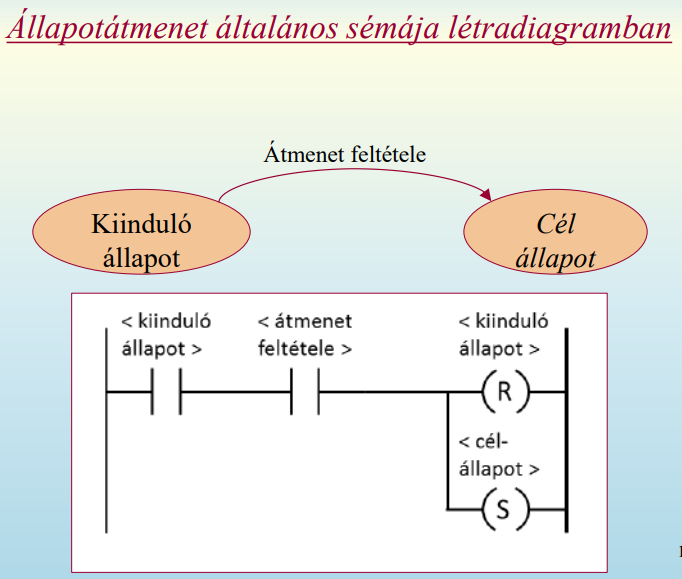
5. Állapotgép fogalma. Állapotátmenet sémája létradiagramban. Léptetőlánc megvalósítása relés kapcsolással
- állapotgép fogalma
- olyan program, amely a bemenetei hatására a belső, véges számú állapot között lépked
- minden bemenet-állapot pároshoz csak egy darab, pontosan meghatározott következő állapot tartozik
- mindig egy bizonyos állapotban van, és attól függően reagál az eseményekre
- az események hatására állapotátmenet történhet
- megadása állapotátmeneti gráffal vagy táblázattal lehetséges
- kiegészítő fogalmak
- állapot
- memóriajelleggel rendelkező rendszerekben a múlt összesített hatása
- állapotváltozó
- az állapot egyértelmű leírásához szükséges mennyiségi vagy minőségi változó (?)
- lehet időfüggvény vagy logikai változó
- állapot
6. A sűrített levegő, mint munkavégző közeg előnyei és hátrányai. A technológiai sűrített levegő előkészítése és eszközei. A pneumatikus elemek csoportosítása. A pneumatikus jelképrendszer bemutatása a szelepek jelképein keresztül
-
nagynyomású levegő (2-10 bar)
- előnyei
- mindenütt, korlátlan mennyiségben megtalálható
- csővezetéken nagy távolságra szállítható, a visszavezetésről nem kell gondoskodni
- (egyszerű szétosztás)
- tartályban, palackban is tárolható
- érzéketlen a hőmérsékletváltozásokra
- környezetbarát, tiszta közeg (pl. gyógyszeriparnál különösen fontos)
- rendszer sérülésekor sem szennyezi a környezetet
- gyors munkaközeg
- pneumatikus munkahenger sebessége 1-2 m/s
- erők és a sebesség fokozatmentesen szabályozható (analóg rendszer)
- elemek egészen a teljes megállásig túlterhelhetők
- munkavégző elemek felépítése egyszerű, alacsony költségű
- nagy energiasűrűség
- pneumatikus motor teljesítmény/tömeg aránya kedvezőbb a villamos motorokénál, ami kézi szerszámoknál előnyös
- fogászati fúró, gumiszerelő légkulcs
- lineáris mozgások könnyen megvalósíthatók egyszerű és nagy megbízhatóságú elemekkel, irányváltás egyszerűen megoldható
- karbantartás egyszerű
- “életreszóló” kenés
- hátrányai
- levegő összenyomhatósága miatt nem lehet állandó, egyenletes dugattyúsebességet elérni
- csak egy meghatározott erőkifejtésig gazdaságos
- kipufogó levegő hangos
- jó előkészítést igényel
- drága energiahordozó
- veszteségforrások
- kompresszor motor és mechanikai eredetű veszteségei
- sűrített levegő visszahűtése
- kompresszor be/kikapcsolási üresjáratai
- hűtveszárító termikus veszteségei
- léghálózat-rendszer
- nyomáseséséből fakadó veszteségek
- szivárgási veszteségek
- pneumatikus elemeken bekövetkező nyomásesés
- (pl. szűrő, szabályzó)
- munkavégző elemek súrlódási veszteségei
- munkahengerben maradt nagynyomású levegő szabadba eresztése
- előnyei
-
technológiai sűrített levegő előkészítése
- kompresszorokkal kívánt nyomásra sűrítés
- hűtve szárítás
- harmatpont-hőmérsékletre történő hűtés elvén
- korrózióvédelem pára (kicsapódás) ellen
- adszorpciós szárítás
- fizikai eljárás
- szárítótöltet porózus, nagy felületű anyag (gél)
- lekötőképessége korlátozott
- telítődés után regenerálható felmelegített levegő átfuvatásával
- lekötőképessége korlátozott
- légszűrő
- szennyeződések eltávolítására
- ahol kell, finomszűrő is (fokozott tisztaság érdekében)
- nyomásszabályzó
-
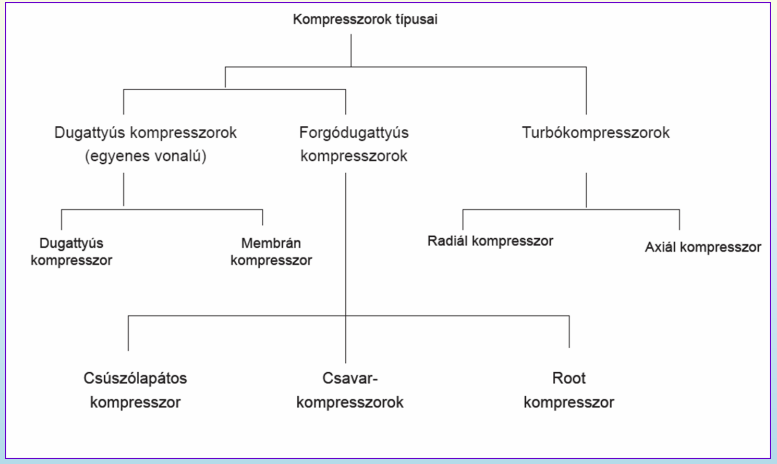
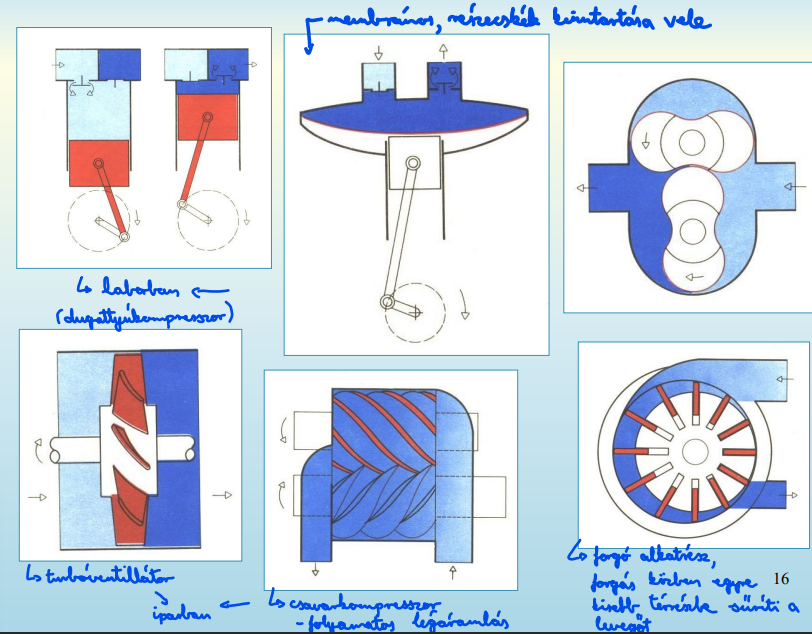
pneumatikus elemek csoportosítása
- előállításhoz
- kompresszor
- típusok…
- légtartály
- csőhálózat
- levegőszűrő
- nyomásszabályozó
- (olajozó)
- kompresszor
- végrehajtó
- forgó mozgást végző elemek
- munkahengerek
- egyszeres
- kétszeres működtetésű
- dugattyúrúd nélküli
- szalag vagy kötél vontatású
- tömítőszalagos (zipzár)
- különleges kivitelű
- átmenő dugattyúrudas
- tandemhengeres
- irányító
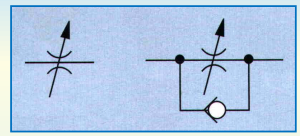
- nyomásállító
- térfogatáram állító
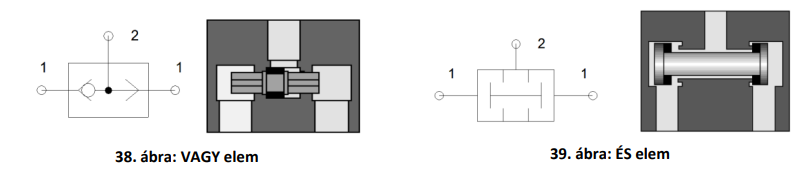
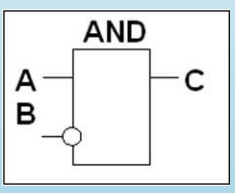
- logikai
- és
- vagy
- útszelepek
- alaphelyzetben nyitott/zárt
- időzítő
- előállításhoz
-
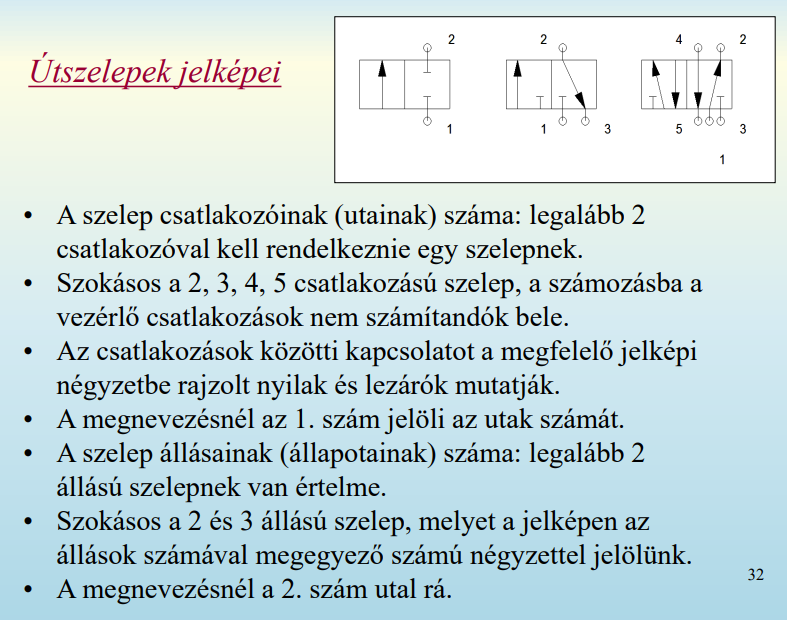
pneumatikus jelképrendszer bemutatása a szelepek jelképeivel
7. Bináris szenzorok csoportosítása. Közelítéskapcsolók főbb típusai, jellemzőik. Időzítők és számlálók típusai, viselkedése az automatizálás területén
-
bináris szenzorok csoportosítása
- érzékelés módja alapján
- érintéses
- pl. végálláskapcsoló
- érintés nélkül
- pl. optikai szenzor
- érintéses
- jelzés módja alapján
- érintkezős
- pl. bontó, záró, váltó
- érintkező nélküli
- érintkezős
- kimeneti jel/logika alapján
- pnp (24V igaz)
- npn (0V igaz)
- érzékelés módja alapján
-
közelítéskapcsolók csoportosítása
- mechanikus helyzetkapcsolók (végálláskapcsolók)
- mágneses elven működő helyzetkapcsolók
- mechanikus érintkezővel működő (reed-relé)
- induktív közelítéskapcsoló
- kapacitív
- optikai
- ultrahangos
- pneumatikus
-
időzítők
- késleltetett meghúzás (TON)
- késleltetett elengedés (TOF)
- impulzus előállító (TP)
- rövid bemenőjelek kezelésére, pontos impulzushossz létrehozására
- ![[Pasted image 20231126165113.png]]
-
számlálók
- CTU - felfele
- CTD - lefele
- CTUD - le/fel
- felejtő/emlékező
8. Mit jelent a SCAN ciklus fogalma? Mekkora egy PLC reakcióideje? Mit nevezünk Real-time üzemmódnak?
9. PLC-k funkcionális egységei. PLC program-hierarchia, felhasználói programnyelvek típusai
-
PLC-k funkcionális felépítése
- központi logikai feldolgozóegység (LU, CPU)
- programmemória (ROM, EEPROM, NAND/NOR-Flash)
- adatmemória (RAM)
- bemeneti (input) egységek (logikai/digitális, analóg)
- kimeneti (output) egységek (logikai/digitális, analóg)
- kommunikációs egységek (COM, TCP/IP, terepi buszok)
- (programozóegység)
- (tápegység)
-
programhierarchia
- PLC gyártó (alapszoftver)
- célgép gyártó (felhasználói program)
- operációs rendszer hozzáféréséhez nincs jogosultság
- célgép üzemeltető
- tesztek, szűk beállítási funkciók
- felhasználói programhoz és operációs rendszerhez sem fér hozzá
- Gépkezelő (operátor)
-
csak kezelőgombokat használhat
-
technológiai paramétereket állít
-
programokhoz nem fér hozzá
-
Felhasználói programnyelvek típusai
- IEC 1131-3 standard alapján
- szöveges
- IL (Instruction List)
- Assembly jellegű
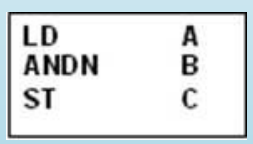
- ST (Structured Text)
- PASCAL-ra emlékeztető

- IL (Instruction List)
- grafikus
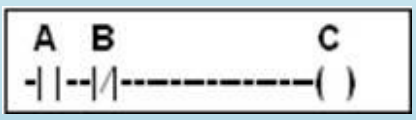
- LD (Ladder Diagram)
- korábban relékhez használt
- FBD (Function Block Diagram)
- blokkjai a létradiagramban is használhatók
- áramköri rajz jellegű
- SFC (Sequential Function Chart)
- léptetőlánc
- sorosan és párhuzamosan végrehajtandó lépések sorozata
- szemléletes
- állapotgép

- LD (Ladder Diagram)
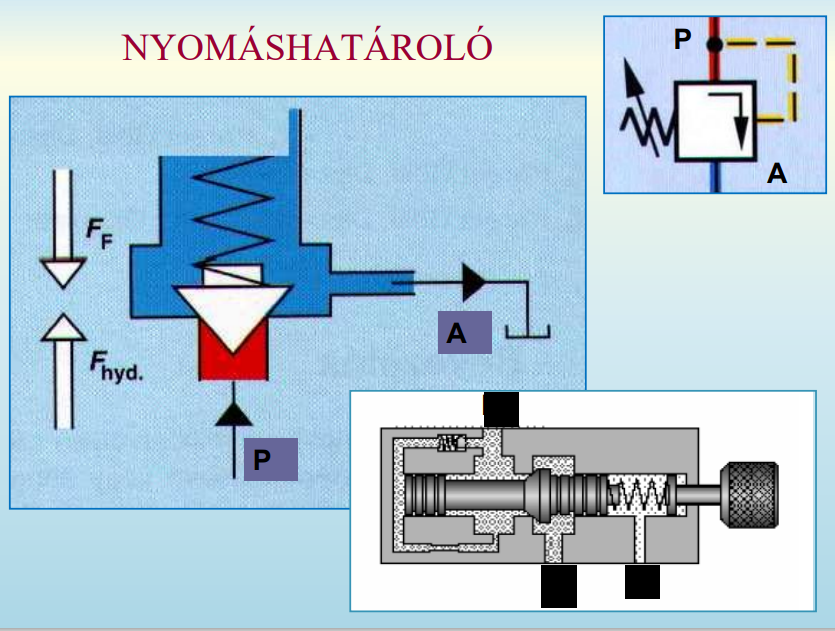
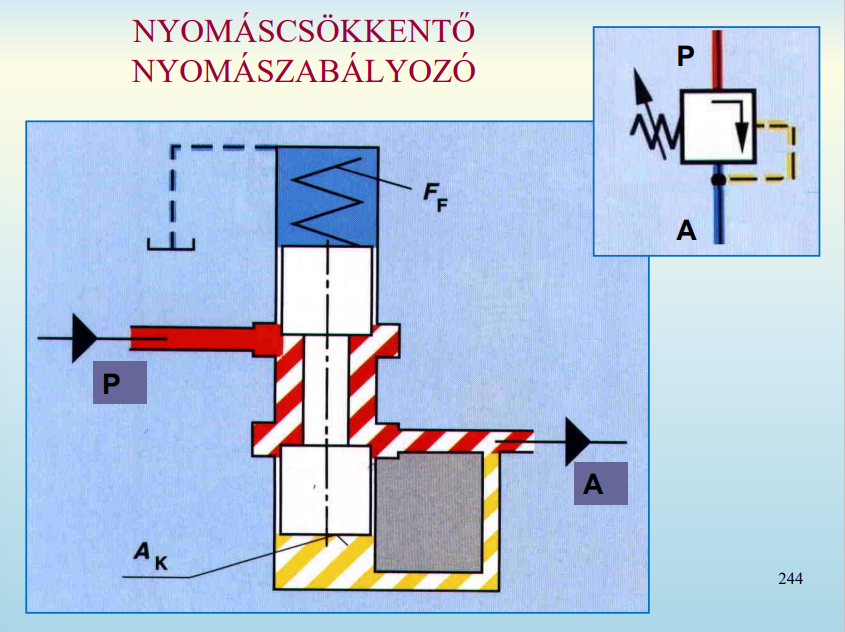
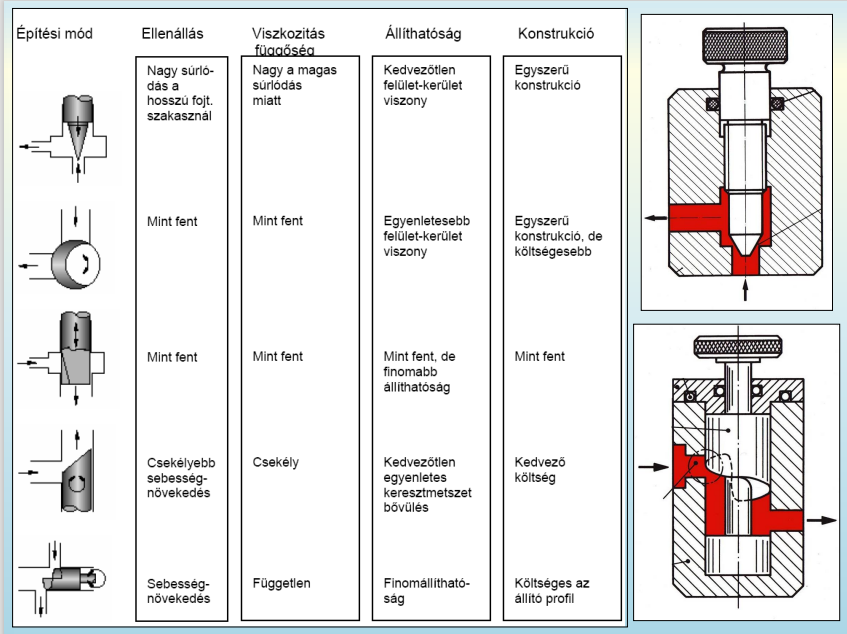
10. Nyomáshatároló szerepe a hidraulikus rendszerekben. Hidraulikus fojtások fajtái, jellemzői.
- nyomáshatároló
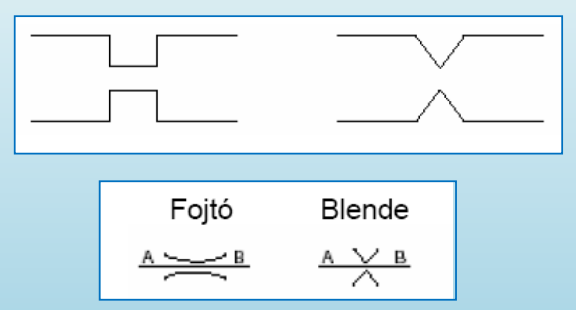
- fojtószelep
- sok vezérlésnél meghatározott értékű nyomásesés (ellenállás) szükséges, ekkor alkalmazzuk
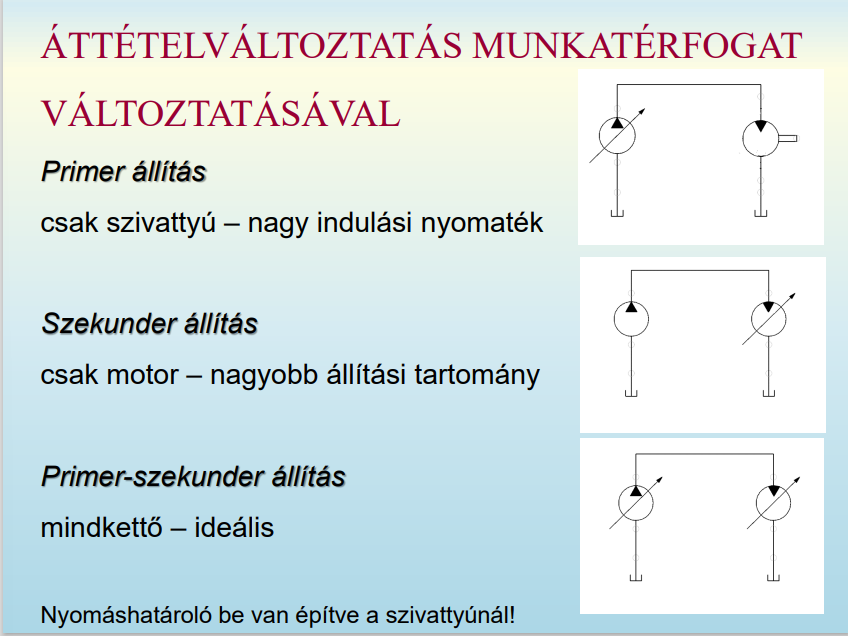
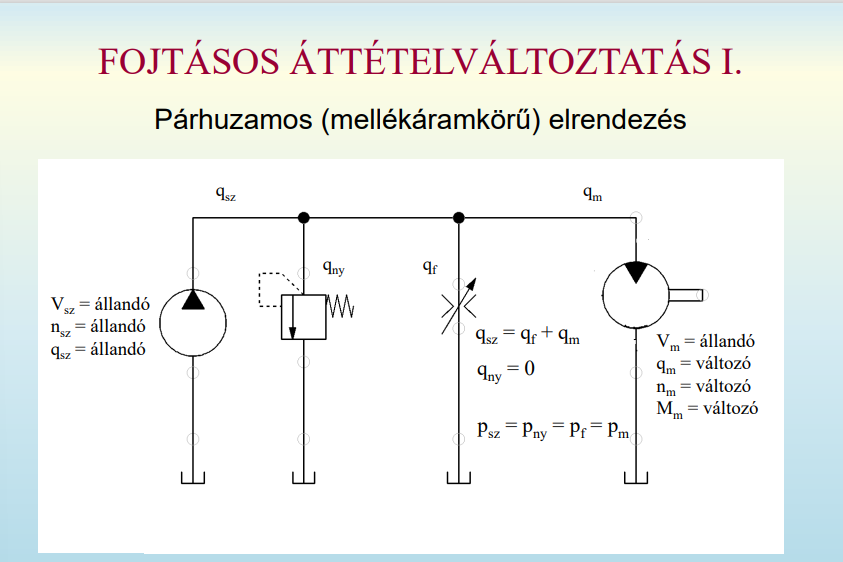
11. Fő és mellékáramkörű hidraulikus áttétel változtatás (áramkör, magyarázat)
- 1. Egy adott feladat, projekt tervezése során a hardver-komponensek és szoftverfejlesztési felmérésénél milyen szempontokat szükséges figyelembe venni?
- 2. Mi a SMoRES irányelv? Milyen előnyei vannak az állapotgép struktúrának a szekvenciális programozással szemben? Mikor érdemes párhuzamosan futó ciklusokat használni?
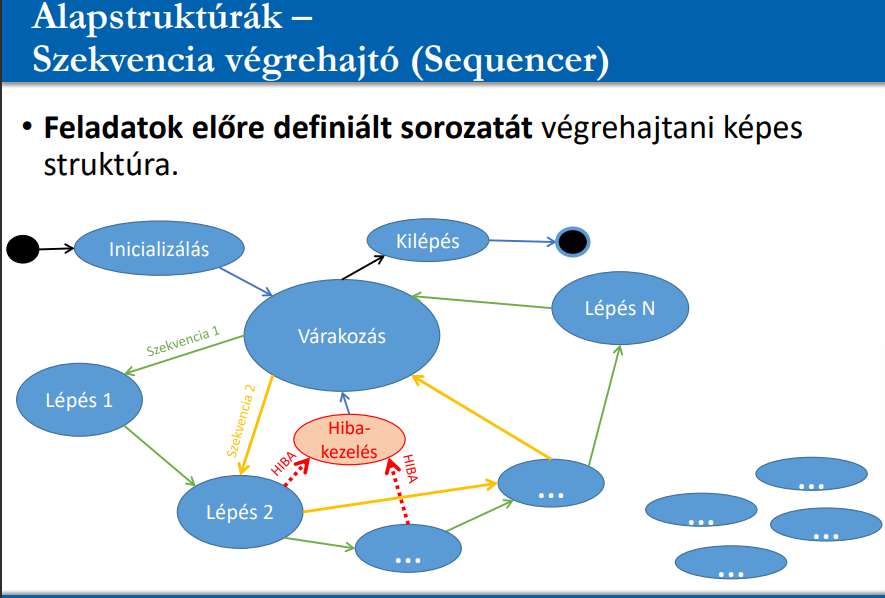
- 3. Mi az eseményvezérelt állapotgép (definíció, szemléltető ábra)? Milyen előnyei vannak az eseményvezérelt programozásnak a ciklikus lekérdezéssel szemben? Mi a „sequencer” (sorozat- végrehajtó) állapotgép (definíció, szemléltető ábra)?
- 4. Melyik szoftverfejlesztési szemléletmódot választaná abban a szoftverfejlesztési projektben, amelyik teljes mértékben specifikált? Melyik szoftverfejlesztési szemléletmódot választaná egy olyan szoftverfejlesztési projektben, amelyik jelentős mennyiségű innovációt tartalmaz?
- 5. Mit nevezünk beágyazott rendszernek? Mi a kemény valós idejű rendszer (hard real-time system (HRT))? Adjon példát kemény valós idejű rendszerre! Mi a puha valós idejű rendszer (soft real- time system (SRT))? Adjon példát puha valós idejű rendszerre!
- 6. Adja meg a valós-idejű operációs rendszer (RTOS) definícióját! Mik egy valós-idejű operációs rendszer (RTOS) legfontosabb tulajdonságai? Milyen vezérlésű lehet egy valós-idejű operációs rendszer (RTOS)? Mik a valós-idejű operációs rendszer (RTOS) feladatai?
- 7. Hogyan épül föl egy adatgyűjtő rendszer? Milyen tulajdonságokkal jellemezhető egy analóg jel? Milyen tulajdonságokkal jellemezhető egy digitális jel?
- 8. Mit mond ki a mintavételezési (Shannon) törvény? Mi befolyásolja a mintavételezései frekvencia nagyságának megválasztását adott feladatok esetében? Milyen hibák lehetnek mintavételezés során? 9. Mi a véges számú minta lekérésű adatgyűjtés folyamata? Mi a folytonos adatgyűjtés folyamata?
- 9. Milyen puffer típusok léteznek? Milyen a FIFO jellegű adatgyűjtési puffer? Milyen a cirkuláris adatgyűjtési puffer?
- 10. Mi az adott méretű mintacsomagot kiadó jelgenerálás folyamata? Mit jelent a regeneratív jelkiadás? Mi a folytonos jelkiadási folyamat?
- 11. Hogyan határozható meg a kimeneti jel frekvenciája a generált periódus, kimeneti frissítési frekvencia és a generált pontok száma alapján? Milyen hiba merülhet fel folyamatos jelkiadás esetén és hogyan szüntethető meg ez a hiba?
1. Egy adott feladat, projekt tervezése során a hardver-komponensek és szoftverfejlesztési felmérésénél milyen szempontokat szükséges figyelembe venni?
- hw
- megvásárolható-e kész termékként?
- nem → egyedi fejlesztés
- magas energiaigény
- igen → jó választás?
- követelmények teljesítése
- kompatibilitás
- ár
- beszerzési idő
- dokumentáció
- terméktámogatás, garancia
- nem → egyedi fejlesztés
- csak később érhető el, vagy kritikus/veszélyes egység
- szimuláció, emuláció?
- döntés költség-, erőforrás- és időhatékonysági szempontok alapján
- megvásárolható-e kész termékként?
- sw
- szempontok fejlesztés menetéhez
- rugalmasság biztosítása
- skálázhatóság
- ciklikusság
- dinamikus adattípusok
- újrahívható állapotok, szubrutinok
- könnyen bővíthető állapotgépek és struktúrák
- modularitás
- amelyek egymástól függetlenül
- futtathatók
- tesztelhetők
- amelyek egymástól függetlenül
- erőforrások védelme
- átláthatóság, nyomonkövethetőség
- forráskód csoportosítása
- könyvtárrendszerbe
- osztályokba
- dokumentáció
- verziókövetés
- forráskód csoportosítása
- rugalmasság biztosítása
- szempontok felhasználói felülethez
- láthatóság
- csak a szükséges elemek
- dinamikusság, átméretezhetőség
- felhasználó tehermentesítése
- automatikus funkciók
- legutóbbi beállítások betöltése
- tevékenységnaplózás
- menthető munkamenet
- jól feliratozott kezelőfelületek
- automatikus funkciók
- egyképernyős elrendezés
- láthatóság
- szempontok fejlesztés menetéhez
2. Mi a SMoRES irányelv? Milyen előnyei vannak az állapotgép struktúrának a szekvenciális programozással szemben? Mikor érdemes párhuzamosan futó ciklusokat használni?
-
SMoRES
- Scalable — skálázható
- Modular — moduláris
- Reusable — újrafelhasználható
- forráskód aktuális alkalmazásról leválasztható, hogy egy újabb projektben is fel lehessen használni
- (=kellően absztrakt)
- forráskód aktuális alkalmazásról leválasztható, hogy egy újabb projektben is fel lehessen használni
- Extensible — bővíthető
- mennyire nehézkes egy új funkció hozzáadása?
- Simple — egyszerű
- lehetséges megoldások közül a legegyszerűbb implementálása
-
állapotgép vs szekvenciális programozás
- ???
- saját kútfőből…
- szekvenciális programozásnál a lépések végrehajtási sorrendjének változtatása nehézkes
- új állapot hozzáadása és a meglévő szerkezetbe csatolása könnyű
- csak az érintett elemeket kell újraírni/kiegészíteni, nem a teljes modult
-
párhuzamosan futó ciklusok használatának előnyei
- független adatokkal dolgozás
- reszponzivitás lehetővé tétele (tehermentesítés)
3. Mi az eseményvezérelt állapotgép (definíció, szemléltető ábra)? Milyen előnyei vannak az eseményvezérelt programozásnak a ciklikus lekérdezéssel szemben? Mi a „sequencer” (sorozat- végrehajtó) állapotgép (definíció, szemléltető ábra)?
- eseményvezérelt állapotgép
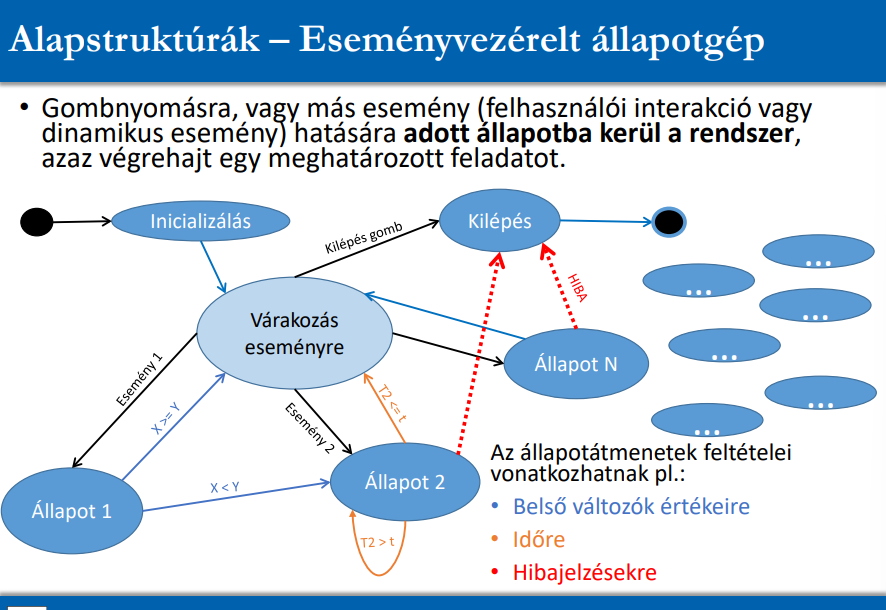
- kis késleltetés érhető el
- nem kell várni egy újabb ellenőrző iterációra a ciklusban
- sorrendfüggetlen
- ciklusbeli működés függhet attól, hogy a ciklusban milyen sorrendben hívjuk meg a kezelőfüggvényeket, eseménykezelésnél ilyesmi nincs
- priorizálható, melyik eseményt kezeljük le
- (bár ez ciklikus lekérdezéssel is megoldható, ha először begyűjtjük az eseményeket, majd egy fontossági sorrend alapján döntünk a kezelésükről)
- processzor tehermentesíthető
- nem kell folyamatosan a ciklusban iterálni, elég csak az eseménykezelések során foglalkozni az alkalmazással
- sequencer
4. Melyik szoftverfejlesztési szemléletmódot választaná abban a szoftverfejlesztési projektben, amelyik teljes mértékben specifikált? Melyik szoftverfejlesztési szemléletmódot választaná egy olyan szoftverfejlesztési projektben, amelyik jelentős mennyiségű innovációt tartalmaz?
- teljes mértékben specifikált → vízesés-modell (V/W-modell)
- PPP — Phased Product Planning
- teljes mértékű specifikáció miatt a munkafolyamatok és időigényük jól tervezhetők
- nagymennyiségű innováció → agilis szoftverfejlesztés
- ciklikus megközelítés
- projekt folyamatos fejlesztése funkciók sorozatos hozzáadásával
- ciklikusság miatt van lehetőség az addig elkészült verziók dokumentálására és tesztelésére is
- ciklikusság miatt képes kezelni a specifikációk, követelmények változását is
- agilis szemléletmód
kötött folyamatok és eszközök→ egyének és interakciókátfogó részletes dokumentáció→ működő szoftvertárgyalások és szerződés→ együttműködés az ügyfélleltervek szigorú lekövetése→ változások lereagálása
- kellő rugalmassággal mindkét megközelítéssel ugyanoda jutunk el adott idő után
- agilis először kaotikus
- vízesés-modell először bürokratikus
5. Mit nevezünk beágyazott rendszernek? Mi a kemény valós idejű rendszer (hard real-time system (HRT))? Adjon példát kemény valós idejű rendszerre! Mi a puha valós idejű rendszer (soft real- time system (SRT))? Adjon példát puha valós idejű rendszerre
- Olyan speciális célú számítógépek, amelyeket konkrét feladat ellátására terveztek
- korlátozott számítási kapacitás és memória
- Egy operációs rendszer valós idejű, ha mindig engedélyezi programjainak, hogy azok adott időbeni korlátokon belül futtassák feladataikat
- lehet esemény- vagy idővezérelt
- kemény valósidejű rendszer
- katasztrofális következményekkel jár, ha nem tartjuk az időkorlátot
- szigorúan definiált és betartott válaszidők jellemzik
- pl. járműirányítás, atomreaktor
- puha valós idejű rendszer
- az eredmény értékes az időkorláton túl is, de az idővel degradálódik
- válaszidő betartása fontos, de a csúszás nem katasztrofális
- pl. tranzakciós rendszerek, multimédia, IoT
6. Adja meg a valós-idejű operációs rendszer (RTOS) definícióját! Mik egy valós-idejű operációs rendszer (RTOS) legfontosabb tulajdonságai? Milyen vezérlésű lehet egy valós-idejű operációs rendszer (RTOS)? Mik a valós-idejű operációs rendszer (RTOS) feladatai?
- Egy operációs rendszer valós idejű, ha mindig engedélyezi programjainak, hogy azok adott időbeni korlátokon belül futtassák feladataikat
- (az időkorlátokat általában az alkalmazás határozza meg)
- e definíció alapján határozhatók meg tulajdonságai is
- csak korlátozott számú feladat → minél több, annál jobb
- bemeneti csatornák időbeli viselkedésének figyelése
- erőforrások monitorozása
- háttérben futó alkalmazások megszakítása, ha szükséges a valósidejűség fenntartásához
- load shedding — határidőre be nem fejezhető feladatok leállítása
- eseményvezérelt RTOS
- az operációs rendszer állapotgépnek tekinthető, amely egy adott esemény bekövetkezésekor vált állapotot
- pl. Rust RTIC (Real-Time Interrupt-driven Concurrency) keretrendszer
- idővezérelt RTOS
- állapotváltozásai az idő függvénye
- pl. FreeRTOS (egy task egy előre definiált ideig fut), persze elérhető más ütemezés is
- feladatai
- párhuzamos programozási környezet biztosítása
- taskok létrehozása és kezelése
- ütemezés
- taskok futtatása
- taskok közötti kommunikáció, szinkronizálás
- (kommunikációs csatornák kezelése)
- ringbuffer, queue, stb.
- megszakítások kezelése
- időzítés
- memóriakezelés
- mert ilyen egy jó kernel… (pl. Windows NT, Linux, bár ezek nem RTOS-ek)
- perifériák kezelése, rendszerprogramok (API)
- szintén minden kernel dolga ez
- párhuzamos programozási környezet biztosítása
7. Hogyan épül föl egy adatgyűjtő rendszer? Milyen tulajdonságokkal jellemezhető egy analóg jel? Milyen tulajdonságokkal jellemezhető egy digitális jel?
8. Mit mond ki a mintavételezési (Shannon) törvény? Mi befolyásolja a mintavételezései frekvencia nagyságának megválasztását adott feladatok esetében? Milyen hibák lehetnek mintavételezés során? 9. Mi a véges számú minta lekérésű adatgyűjtés folyamata? Mi a folytonos adatgyűjtés folyamata?
9. Milyen puffer típusok léteznek? Milyen a FIFO jellegű adatgyűjtési puffer? Milyen a cirkuláris adatgyűjtési puffer?
10. Mi az adott méretű mintacsomagot kiadó jelgenerálás folyamata? Mit jelent a regeneratív jelkiadás? Mi a folytonos jelkiadási folyamat?
11. Hogyan határozható meg a kimeneti jel frekvenciája a generált periódus, kimeneti frissítési frekvencia és a generált pontok száma alapján? Milyen hiba merülhet fel folyamatos jelkiadás esetén és hogyan szüntethető meg ez a hiba?
- 1. A finommechanikai szerkezet definíciója.
- 2. A méretkicsinyítés hatásai.
- 3. A finommechanikai kötések felosztása és rendszerezése.
- 4. A finommechanikai szerkezetek felosztása és rendszerezése.
- 5. Anyaggal záró kötések felosztása és ismertetése.
- 6. Alakkal záró kötések felosztása és ismertetése.
- 7. Rugalmas alakváltozással záró kötések felosztása és ismertetése. Dobozolt kötések.
- 8. Finommechanikai egyenes vezetékek felosztása és jellemző tulajdonságaik.
- 9. Hajtórugók, a házba épített rugó.
- 10. Finommechanikai villamos kötések rendszerezése és bemutatása.
1. A finommechanikai szerkezet definíciója
2. A méretkicsinyítés hatásai
3. A finommechanikai kötések felosztása és rendszerezése
4. A finommechanikai szerkezetek felosztása és rendszerezése
5. Anyaggal záró kötések felosztása és ismertetése
6. Alakkal záró kötések felosztása és ismertetése
7. Rugalmas alakváltozással záró kötések felosztása és ismertetése. Dobozolt kötések
8. Finommechanikai egyenes vezetékek felosztása és jellemző tulajdonságaik.
9. Hajtórugók, a házba épített rugó
10. Finommechanikai villamos kötések rendszerezése és bemutatása
- 1. Automatika, irányítástechnika, vezérléstechnika fogalmának meghatározásai. Vezérlés és szabályozás összehasonlítása.
- 2. Analóg és digitális jel. AD átalakítás lépései, nulladrendű tartó szerepe.
- 3. AD átalakítók fontosabb tulajdonságai. A felbontóképesség fogalma (12 bites esetben példán bemutatva).
- 4. Pneumatikus rendszer szabályozási (mozgásjellemzők állításának) lehetőségei, és eszközei.
- 5. Proporcionális eszközök a pneumatikában.
- 6. Szervo-hajtásoknál szokásos referencia (zérus) pontok bemutatása. Abszolút és relatív koordináta megadás a FESTO szervo-pneumatikus hajtásnál.
- 7. Közelítéskapcsolók főbb típusai, jellemzőik. Analóg távadóknak az ipari gyakorlatban alkalmazott jeltartományainak bemutatása.
- 8. Szervopneumatikus hajtás felépítése, az egyes elemek feladatának ismertetése, szerepe.
- 9. Analóg és digitális szervo-pneumatikus vezérlés összehasonlítása. FESTO szervo-pneumatikus hajtás elemeinek bemutatása
1. Automatika, irányítástechnika, vezérléstechnika fogalmának meghatározásai. Vezérlés és szabályozás összehasonlítása
-
automatika
- A műszaki tudományok azon ága, amely az önműködő irányítás törvényszerűségeivel és gyakorlati megvalósításával foglalkozik
-
irányítástechnika
- Olyan művelet, amely valamely műszaki folyamatba annak létrehozása (elindítása), fenntartása, tervszerű lefolyásának biztosítása, megváltoztatása vagy megszüntetése (megállítása) végett beavatkozik
-
vezérléstechnika
-
vezérlés
- az irányításnak az a típusa, amelyben a rendelkezés és a beavatkozás az irányítani kívánt jellemzőtől függetlenül, külső jel hatására jön létre
- nyílt hatásláncú (open loop)
- fontos a zavaró hatások befolyásának csökkentése
- csak a tervezéskor ismert zavarójelek kiküszöbölésére képes
- de nincsenek instabilitási problémák (nyílt hatáslánc miatt)
- folyamat bemenő jeleit figyeli
- csoportosítása [[GépAut záróvizsga tételek kidolgozása#4. A vezérlések csoportosítása. Programvezérlés fajtái. Vezérlések megbízhatóságának növelési lehetőségei. Védelmi funkciók ipari rendszerekben.]] szerint
-
szabályozás
- az irányításnak az a típusa, melyben az irányítani kívánt jellemző tényleges és előírt értékeinek eltérése alapján jön létre a rendelkezés és a beavatkozás
- zárt hatásláncú (closed loop)
- csak bizonyos határokon belül képes a szabályozott jellemzőt tűrésen belüli értéken tartani
- zárt hatáslánc miatt instabilitási problémák (rezonancia, lengés) léphetnek fel
- megelőzésük figyelmet igényel
- lehet
- folytonos (analóg)
- diszkrét (digitális)
2. Analóg és digitális jel. AD átalakítás lépései, nulladrendű tartó szerepe.
3. AD átalakítók fontosabb tulajdonságai. A felbontóképesség fogalma (12 bites esetben példán bemutatva)
4. Pneumatikus rendszer szabályozási (mozgásjellemzők állításának) lehetőségei, és eszközei
5. Proporcionális eszközök a pneumatikában
6. Szervo-hajtásoknál szokásos referencia (zérus) pontok bemutatása. Abszolút és relatív koordináta megadás a FESTO szervo-pneumatikus hajtásnál
7. Közelítéskapcsolók főbb típusai, jellemzőik. Analóg távadóknak az ipari gyakorlatban alkalmazott jeltartományainak bemutatása.
- közelítéskapcsolók főbb típusai, jellemzőik GépAut 7. tétel alapján
8. Szervopneumatikus hajtás felépítése, az egyes elemek feladatának ismertetése, szerepe
9. Analóg és digitális szervo-pneumatikus vezérlés összehasonlítása. FESTO szervo-pneumatikus hajtás elemeinek bemutatása
- 1. Lebegőpontos és fixpontos számábrázolás definíciók, számok ábrázolása, összehasonlítás, fixpontos műveletek (szorzás, osztás, kivonás), normált fixpontos számok szerepe
- 2. FPGA FPGA-k lényege, architektúrája (logikai cella és kapcsolóelemek), a programozási technológiák (SRAM, Flash memória), FPGA-k bővítése RAM-mal, CPU-val és további elemekkel, soft és hard IP-k, FPGA hardver fejlesztésének lépései sematikus és VHDL nyelven, VHDL nyelv lényeges tulajdonságai
- 3. Ipari kommunikációs technikák - alapok ISO/OSI referenciamodell felépítése, közeg-hozzáférés, fizikai rétegek (RS-485, Ethernet, CAN)
- 4. Ipari kommunikációs technikák – protokollok Profibus és Modbus, IO Link, Ipari ethernet, Profinet, CAN
- 5. Áramkörök energiatárolása - akkumulátorok akkumulátorok működési elve, paraméterei, helyettesítő modell, lítium-ion alapú akkumulátorok, BMS szerepe és működése
- 6. Kódgenerálás és HIL szimuláció HIL szimuláció szerepe, kialakulásának oka, HIL lehetőségek, HIL kialakításának fő lépései, Szigma-Delta modulátorok szerepe,
- 7. Valós idejű operációs rendszerek Round-Rubin, felépítés, preemptív vs. nem-preemptív, taszkok állapotai, szemafor, taszkok közötti kommunikáció, memóriamenedzsment, megszakítások kezelése
- 8. ARM mikrovezérlők RISC tulajdonságok, architektúraprofilok, ARM utasításkészlet architektúra, feltételes végrehajtás, barrel eltoló, közvetlen konstansok ábrázolása, THUMB végrehajtási módok
- 9. Egy választott esettanulmány elemzése Az előadás során bemutatott esettanulmányok közül egy választott bemutatás